@article{stereoposer,title={Stereo-Inertial Poser: Towards Metric-Accurate Shape-Aware Motion Capture Using Sparse IMUs and a Single Stereo Camera},author={Tang, Tutian and Ji, Xinyu and Li, Yutong and Liu, M. H. and Xu, Wenqiang and Lu, Cewu},journal={arXiv preprint arXiv:2603.02130},year={2026},}
2025
arXiv
FBI: Learning Dexterous In-hand Manipulation with Dynamic Visuotactile Shortcut Policy
Y. Chen, Wenqiang Xu, Zhenjun Yu, Tutian Tang, Yutong Li, Siqiong Yao, and Cewu Lu
@article{fbi,title={FBI: Learning Dexterous In-hand Manipulation with Dynamic Visuotactile Shortcut Policy},author={Chen, Y. and Xu, Wenqiang and Yu, Zhenjun and Tang, Tutian and Li, Yutong and Yao, Siqiong and Lu, Cewu},journal={arXiv preprint arXiv:2508.14441},year={2025},}
ICCV
Dynamic Reconstruction of Hand-Object Interaction with Distributed Force-aware Contact Representation
Zhenjun Yu*, Wenqiang Xu*, Pengfei Xie, Yutong Li, Brian W. Anthony, Zhuorui Zhang, and Cewu Lu
In ICCV IEEE/CVF International Conference on Computer Vision , 2025
@inproceedings{vitamd,title={Dynamic Reconstruction of Hand-Object Interaction with Distributed Force-aware Contact Representation},author={Yu*, Zhenjun and Xu*, Wenqiang and Xie, Pengfei and Li, Yutong and Anthony, Brian W. and Zhang, Zhuorui and Lu, Cewu},booktitle={{ICCV} IEEE/CVF International Conference on Computer Vision},pages={},year={2025},}
IROS
FSGlove: An Inertial-Based Hand Tracking System with Shape-Aware Calibration
Yutong Li*, Jieyi Zhang*, Wenqiang Xu, Tutian Tang, and Cewu Lu
@inproceedings{fsglove,title={FSGlove: An Inertial-Based Hand Tracking System with Shape-Aware Calibration},author={Li*, Yutong and Zhang*, Jieyi and Xu, Wenqiang and Tang, Tutian and Lu, Cewu},booktitle=iros,pages={},year={2025},organization={IEEE},}
2024
NC
Capturing forceful interaction with deformable objects using a deep learning-powered stretchable tactile array
Chunpeng Jiang*, Wenqiang Xu*, Yutong Li, Zhenjun Yu, Longchun Wang, Xiaotong Hu, Zhengyi Xie, Qingkun Liu, Bin Yang, Xiaolin Wang, Wenxin Du, Tutian Tang, Dongzhe Zheng, Siqiong Yao, Cewu Lu, and Jingquan Liu
@article{vitam,title={Capturing forceful interaction with deformable objects using a deep learning-powered stretchable tactile array},author={Jiang*, Chunpeng and Xu*, Wenqiang and Li, Yutong and Yu, Zhenjun and Wang, Longchun and Hu, Xiaotong and Xie, Zhengyi and Liu, Qingkun and Yang, Bin and Wang, Xiaolin and Du, Wenxin and Tang, Tutian and Zheng, Dongzhe and Yao, Siqiong and Lu, Cewu and Liu, Jingquan},journal={Nature Communications},volume={},number={},pages={},year={2024},publisher={Nature Publishing Group UK London},}
RA-L
DiPGrasp: Parallel Local Searching for Efficient Differentiable Grasp Planning
Wenqiang Xu*, Jieyi Zhang*, Tutian Tang, Zhenjun Yu, Yutong Li, and Cewu Lu
@article{dipgrasp,title={DiPGrasp: Parallel Local Searching for Efficient Differentiable Grasp Planning},author={Xu*, Wenqiang and Zhang*, Jieyi and Tang, Tutian and Yu, Zhenjun and Li, Yutong and Lu, Cewu},journal={IEEE Robotics and Automation Letters},volume={},number={},pages={},year={2024},publisher={IEEE},}
IROS
Differentiable Fluid Physics Parameter Identification By Stirring and For Stirring
Wenqiang Xu*, Dongzhe Zheng*, Yutong Li, Jieji Ren, and Cewu Lu
@inproceedings{diffstir,title={Differentiable Fluid Physics Parameter Identification By Stirring and For Stirring},author={Xu*, Wenqiang and Zheng*, Dongzhe and Li, Yutong and Ren, Jieji and Lu, Cewu},booktitle=iros,pages={},year={2024},organization={IEEE},}
2023
CoRL
Precise Robotic Needle-Threading with Tactile Perception and Reinforcement Learning
Zhenjun Yu*, Wenqiang Xu*, Siqiong Yao, Jieji Ren, Tutian Tang, Yutong Li, Guoying Gu, and Cewu Lu
@inproceedings{tnt,title={Precise Robotic Needle-Threading with Tactile Perception and Reinforcement Learning},author={Yu*, Zhenjun and Xu*, Wenqiang and Yao, Siqiong and Ren, Jieji and Tang, Tutian and Li, Yutong and Gu, Guoying and Lu, Cewu},booktitle=corl,year={2023},}
CoRL
UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding
Han Xue*, Yutong Li*, Wenqiang Xu, Huanyu Li, Dongzhe Zheng, and Cewu Lu
@inproceedings{unifolding,title={UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding},author={Xue*, Han and Li*, Yutong and Xu, Wenqiang and Li, Huanyu and Zheng, Dongzhe and Lu, Cewu},booktitle=corl,year={2023},}
RSS
Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI
Haoyuan Fu*, Wenqiang Xu*, Ruolin Ye*, Han Xue, Zhenjun Yu, Tutian Tang, Yutong Li, Wenxin Du, Jieyi Zhang, and Cewu Lu
@inproceedings{rfu,title={Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI},author={Fu*, Haoyuan and Xu*, Wenqiang and Ye*, Ruolin and Xue, Han and Yu, Zhenjun and Tang, Tutian and Li, Yutong and Du, Wenxin and Zhang, Jieyi and Lu, Cewu},booktitle=rss,year={2023},}
@inproceedings{garmenttracking,title={GarmentTracking: Category-Level Garment Pose Tracking},author={Xue, Han and Xu, Wenqiang and Zhang, Jieyi and Tang, Tutian and Li, Yutong and Du, Wenxin and Ye, Ruolin and Lu, Cewu},booktitle=cvpr,pages={21233--21242},year={2023},}
ICCV
ClothPose: A Real-World Benchmark for Visual Analysis of Garment Pose via An Indirect Recording Solution
Wenqiang Xu*, Wenxin Du*, Han Xue, Yutong Li, Ruolin Ye, Yan-Feng Wang, and Cewu Lu
@inproceedings{clothpose,title={ClothPose: A Real-World Benchmark for Visual Analysis of Garment Pose via An Indirect Recording Solution},author={Xu*, Wenqiang and Du*, Wenxin and Xue, Han and Li, Yutong and Ye, Ruolin and Wang, Yan-Feng and Lu, Cewu},booktitle=iccv,pages={58--68},year={2023},}
2022
Towards an energy-efficient Data Center Network based on deep reinforcement learning
Yang Wang, Yutong Li, Ting Wang, and Gang Liu
Computer networks, 2022
2020
A Salience & Motion State Based Quality Adjustment for 360-Degree Video Transmission
Nan Zong, Jialiang Lu, Yutong Li, and Zhenyu Xie
In Proceedings of the 2020 4th International Conference on Big Data and Internet of Things , 2020
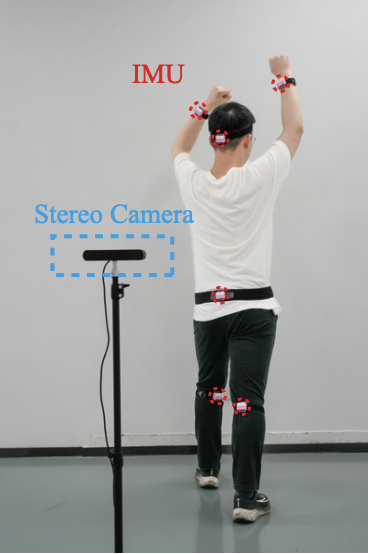 Stereo-Inertial Poser: Towards Metric-Accurate Shape-Aware Motion Capture Using Sparse IMUs and a Single Stereo CameraarXiv preprint arXiv:2603.02130, 2026
Stereo-Inertial Poser: Towards Metric-Accurate Shape-Aware Motion Capture Using Sparse IMUs and a Single Stereo CameraarXiv preprint arXiv:2603.02130, 2026
 FBI: Learning Dexterous In-hand Manipulation with Dynamic Visuotactile Shortcut PolicyarXiv preprint arXiv:2508.14441, 2025
FBI: Learning Dexterous In-hand Manipulation with Dynamic Visuotactile Shortcut PolicyarXiv preprint arXiv:2508.14441, 2025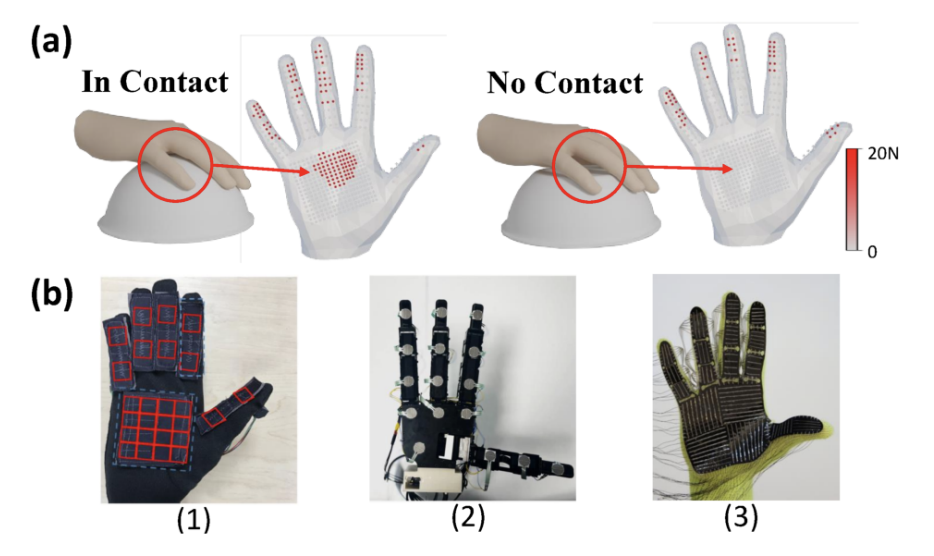 Dynamic Reconstruction of Hand-Object Interaction with Distributed Force-aware Contact RepresentationIn ICCV IEEE/CVF International Conference on Computer Vision , 2025
Dynamic Reconstruction of Hand-Object Interaction with Distributed Force-aware Contact RepresentationIn ICCV IEEE/CVF International Conference on Computer Vision , 2025








